Purpose of the flight and payload description
HASP stands for High Altitude Student Platform and is a program aimed to foster student excitement in an aerospace career path and to help address workforce development issues in this area. In the framework of the program a multi-instrumented platform was designed to carry up to twelve student payloads to an altitude of about 36 kilometers with flight durations of 15 to 20 hours using a small volume, zero pressure balloon. The payloads carried by HASP are designed and built by students and are used to flight-test compact satellites or prototypes and to fly other small experiments. The state of Louisiana and the Louisiana Space Consortium have funded the construction and operation of HASP and the Columbia Scientific Balloon Facility (CSBF) through the NASA Balloon Program Office has committed to flying HASP once a year for three years.
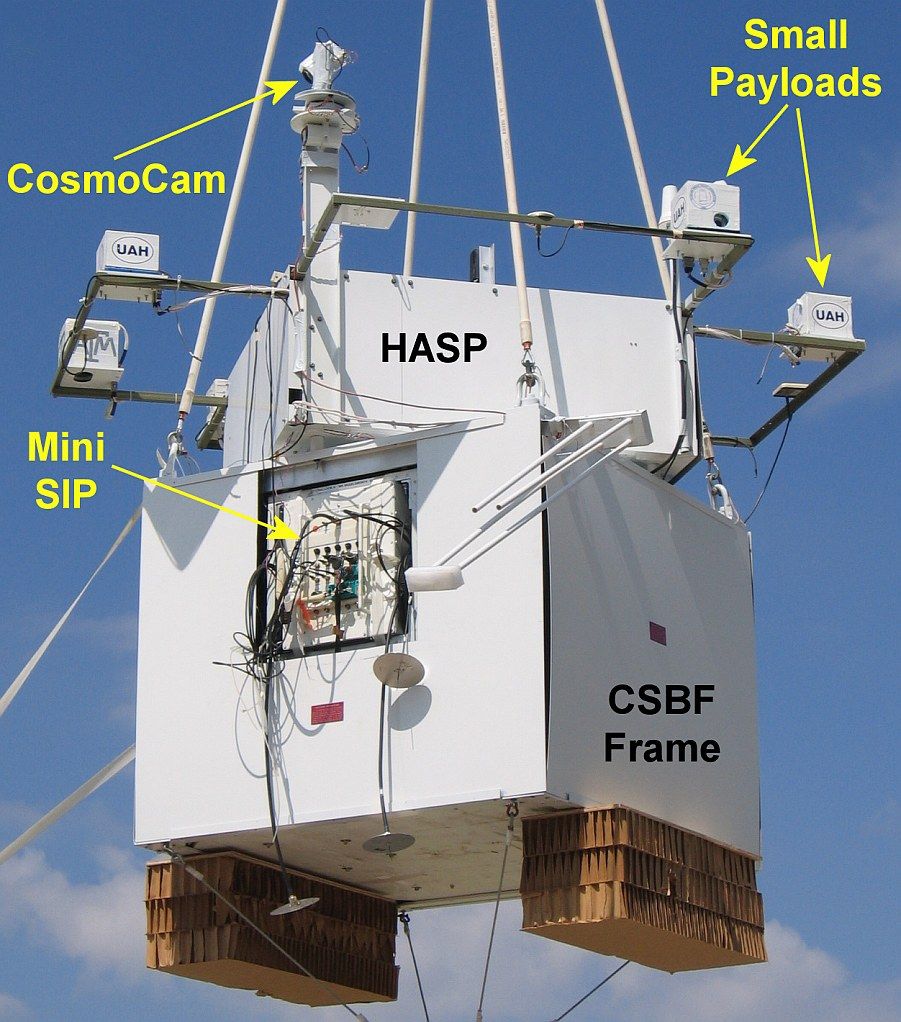
At left can be seen an image of the entire HASP flight configuration payload which is composed of two major components; the CSBF frame on the bottom and the HASP system on the top. The CSBF frame is the primary structural element of the payload and was recycled from an older test payload frame by the CSBF. This component houses all the subsystems CSBF requires to monitor and control the balloon vehicle. On the top corners of this frame are the attachment points for cabling leading to the swivel, flight train, parachute and balloon. Each suspension cable is threaded through a PVC pipe increasing the rigidity of the suspension system and reducing the probability that, upon landing, the swivel would impact student payloads located on the top of HASP. On the bottom of the CSBF frame is the cardboard honeycomb crush pad and attach points for the ballast hopper suspension cables.
The interior of the frame supports a Mini-SIP (Support Instrument Package) that interfaces to the HASP electronics and provides uplinkdownlink communication with the balloon payload, with empty room for a variety of prototypes and test articles, allowing the CSBF to test fly new technology that may improve the performance of future professional scientific balloon systems.
Attached to the core structural frame are four fiberglass frames that support the small (< 1 kg) student payloads. Each brace
extends 56 cm away from the aluminum frame and supports two student payload mounting plates, each of which includes standard mechanical, power and serial communication interfaces. One such brace is attached to each side of the core structure to accommodate up to eight student payloads. This configuration was chosen to minimize interference between the metal frame and any student payloads that may exercise their transmitters during flight. In addition, up to four large (< 10 kg) student payloads can be mounted on the top of the core structure and have a power and communication interface similar to that of the small payloads.
The command and control subsystem, provides the means for receiving and processing uplinked commands, acquiring and archiving the payload data, downlinking status information and interfacing with the student payloads. There are three primary control modules in the subsystem that communicate with each other over a 100 Mbps (megabit per second) internal Ethernet network. These modules are the Flight Control Unit (FCU) which "manages" the subsystem; decoding commands received from the CSBF supplied Mini-SIP and distributing them, watching for units that may need to be reset, collecting status information and downlinking data through the Mini-SIP. In addition, the FCU also monitors the voltages and currents of the power system and collects environmental temperature information for housekeeping records.
The Data Archive Unit (DAU) that controls the on-board recording of all data, making these data records available to other processes on the network, controlling the HASP GPS receiver and managing the time-stamping of all records. All on-board recording is to Compact Flash cards which appear as hard disks to the operating system, but function well in hard vacuum. The Serial Communications Unit (SCU) runs the software which communicates with the student payloads. Without this unit, student data will not be collected.
Finally, temperature sensors are placed at strategic locations around HASP (e.g. batteries, solar shield panels, exterior) to monitor the environment and assess the thermal performance of the system. The input power source for HASP is about 30 VDC and is provided by either a Lambda ZUP36-24 for ground operations or eight B7901-11 eleven cell lithium sulphur dioxide batteries for flight.
One of the major innovations incorporated into HASP was to mount all the command and control components on a single 109 cm x 36 cm Electronics Mounting Plate (EMP). This has the primary advantage that the EMP can be easily removed from the HASP frame for easy access to all the electronics during debugging, testing and/or servicing. In addition, a complete flight spare EMP was built during HASP development and can be used as a "plug and play" replacement in the field should problems arise with the original.
Details of the balloon flight
Balloon launched on: 9/2/2007 at 13:12
Launch site: Scientific Flight Balloon Facility, Fort Sumner, (NM), US
Balloon launched by: Columbia Scientific Balloon Facility (CSBF)
Balloon manufacturer/size/composition: Zero Pressure Balloon Raven - W11.82-1E-37 - 11.820.000 cuft
Balloon serial number: W11.82-1E-40
Flight identification number: 573N
End of flight (L for landing time, W for last contact, otherwise termination time): 9/3/2007 at 7:52
Balloon flight duration (F: time at float only, otherwise total flight time in d:days / h:hours or m:minutes - ): ~ 19 h
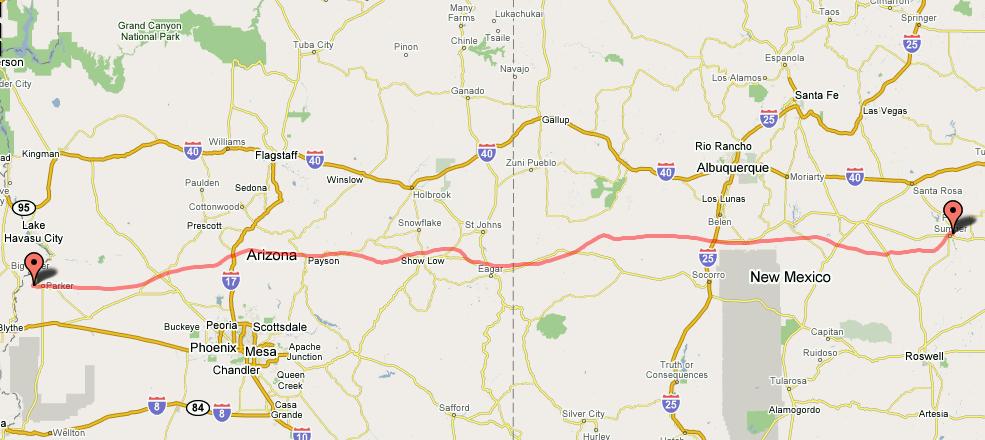
Landing site: Near Poston, Arizona, USA
Preparation for launch began at about 9:30 UTC when HASP was rolled out of the hanger and picked up by the launch vehicle. Following the roll out to the launch pad the flight train and parachute was layed out, followed by the balloon. Balloon inflation began about 12:40 UTC and was completed about 13:05 am. The launch was accomplished by dynamic method with assistance from launch vehicle at 13:12 UTC, with surface winds almost zero, resulting in a very smooth manouver. HASP reached a float altitude of about 123,000 feet at about 15:30 UTC and proceeded to travel west at about 40 knots.
At right can be seen a map showing the balloon path (click to enlarge).
The flight was terminated at 7:52 UTC on September 3, near Poston, AZ (near the California border) after a total flight time close to 19 hours.
The payload was successfully recovery from a freshly irregated farm field near Poston, AZ during the morning of September 3. The recovery crew returned HASP to Ft. Sumner by late afternoon of September 4, where the scientific team had a first look at the landing damage. Almost all of the student payloads appeared to have suffered very little injury during landing and recovery. The recovery crew removed most of the small payloads from the fiberglass extension booms and dismounted the UAH, MSU and ULL large payload prior to dragging HASP out of the field. They even managed to fish out from the mud one of the TAMU cameras that had broken off during landing. The HASP electronics system appeared very clean with no obvious evidence of water damage or extensive mud intrusion into the interior.
This second flight of the platform included the following experiments:
Hawk Helping Accrue Space Practice a payload which includes a number of sensors as accelerometer, camera, experimental power system, sun exposure, wind, radiation and possibly an RF data transfer. Using a CubeSat form factor the payload and sensors will be developed by a student team during the course of study. Development of this payload is a focal point for the UMES Gateway to Space course to be held during spring 2007 (Hawk Institute for Space Sciences / UMES)
GEOCAM a prototype low cost high altitude imaging system that could be useful to quickly gather data in response to a natural disaster. Commercial off-the-shelf hardware and software is used to minimize payload cost and display panoramic views shortly after flight on the web. This is a reflight of the successful HASP 2006 GEOCAM payload (Texas A&M University)
Student High-Altitude Power Experiments (SHAPE) a payload to examine the effectiveness of different power storage devices under high-altitude flight conditions. The charging and discharging characteristics of NiMH, NiCd, Li Ion and supercapacitors regenerative power system will be studied. In addition, a control set of fully charged devices will be flown and the state of charge of these devices will be examined during post-flight analysis. (University of Alabama - Tuscaloosa)
Super Capacitor Driven CubeSat Power System part of the overall Cajun Advanced Picosatellite Experiment (CAPE) effort, and is designed to test a solar cell/supercapacitor power system for a future cubesat space payload. The charging and discharging of the supercapacitor will be studied for high (1 A) and low (100 mA) currents at high altitude to determine the overall efficiency and general performance of the system. (University of Louisiana - Lafayette)
HYPER-GEOCAM a prototype low cost high altitude imaging system that could be useful to quickly gather data in response to a natural disaster. Commercial off-the-shelf hardware and software is used to minimize payload cost and display panoramic views shortly after flight on the web. The project proposed to obtain crude hyperspectral information by reflecting the image off of a CD/DVD grating. The project also proposes to obtain sky as well as ground images. (Texas A&M University)
High Altitude Cosmic Radiation Detector a payload to study the variation of cosmic radiation with altitude and time in the atmosphere. Two detectors each viewed by a photomultiplier tube are used to provide singles, coincident and accidental counting rates to determine the flux of radiation as a function of altitude. (West Virginia University)
Thermal Imaging Balloon Experiment (TIBE) an instrument designed to gain a better understanding of the thermal effects that a high-altitude balloon experiences during flight. A thermal imaging camera is used to measure the balloon surface temperature and study the temperature gradients across the balloon. This work builds upon previous Deep Space Test Bed and HASP 2006 flights so the imaging obtained in this flight will be compared with the results from those previous flights. (University of Alabama, Huntsville).
Passive High Altitude Particle Capture Experiment the purpose of the experiment is to collect particles, especially those of extraterrestrial origin, from the stratosphere and return them to earth for analysis. A 900 cm2 collection plate will be coated in a silicone oil to trap high altitude particles. A pneumatically operated box lid will be opened and closed at high altitude and the closed box will have a positive pressure to minimize contamination. Particle collected will be later compared with samples from the NASA Cosmic Dust Laboratory. (Montana State University)
Investigation of a Single Stage to Orbit (SSTO) Rocket Engine Nozzle a payload designed to compare the performance characteristics of an optimized aerospike altitude compensating nozzle with a conventional bell shaped nozzle as a function of altitude. A small quantity of compressed nitrogen gas will be discharged through each nozzle and the resulting thrust force will be measured by compression type load cells. Various performance coefficients will be computed from the collected data and compared to theoretical predictions. (Louisiana State University).
CajunSat III a continuation of the nuclear emulsion stack experiment begun with the HASP 2006 flight. For HASP 2007 a second stack will be developed and will include Thermo Luminescent Detectors to help estimate dose at each layer and to compare with the track density observed in the emulsions.
As a "piggy back" payload HASP carried a web camera developed by Rocket Science, Inc. called CosmoCam. This device is designed to bring live views of the balloon launch and flight from on-board the payload to students, classroom and the general public. The video camera head, mounted on a vertical stanchion, includes a 26º optical zoom with full pan and tilt control available over the web. The downlinked streaming video is retransmitted over the internet for general viewing. CosmoCam was particularly useful for the project as it allows student teams to visually inspect and monitor their payload
during flight.
To obtain more details of the performance in flight of the instruments visit the web sites listed below in the references section.
External references
- HASP website Louisiana Space Consortium
- Balloon Launches Inside Wallops - Volume XX-07 Number 33 (PDF)
- Development of the High Altitude Student Platform 2006 COSPAR paper submitted to Advances in Space Research, Nov. 2006 (PDF Version)
- Geocam (Blog)
- Geocam (web site)
- HASP Balloon over Show Low AZ William Shipitalo (Picasa web gallery)
- High Altitude Cosmic Radiation Detector (web site)
- High Altitude Weather Balloon over Payson Deep Space Astrophotography by Chris and Dawn Schur
- Overview of the NASA Balloon Program Office (BPO) and Potential Student Opportunities Presentation to the National Council of Space Grants Directors Meeting, October 2006
- Passive High Altitude Particle Capture Experiment (web site)
- Physics Students Teaming with NASA for Airborne Experiments LSU Office of Public Affairs
- Results from the low mass cosmic ray experiment on the HASP balloon Nuclear Science Symposium Conference Record, 2007. NSS '07. IEEE
- The High Altitude Student Platform (HASP) for Student-Built Payloads Presentation to the 35th COSPAR Scientific Assembly, July 2004
Images of the mission




If you consider this website interesting or useful, you can help me to keep it up and running with a small donation to cover the operational costs. Just the equivalent of the price of a cup of coffee helps a lot.
