Purpose of the flight and payload description
HASP stands for High Altitude Student Platform and is a program aimed to foster student excitement in an aerospace career path and to help address workforce development issues in this area. In the framework of the program a multi-instrumented platform was designed to carry up to twelve student payloads to an altitude of about 36 kilometers with flight durations of 15 to 20 hours using a small volume, zero pressure balloon. The payloads carried by HASP are designed and built by students and are used to flight-test compact satellites or prototypes and to fly other small experiments. The state of Louisiana and the Louisiana Space Consortium have funded the construction and operation of HASP and the Columbia Scientific Balloon Facility (CSBF) through the NASA Balloon Program Office has committed to flying HASP once a year for three years.
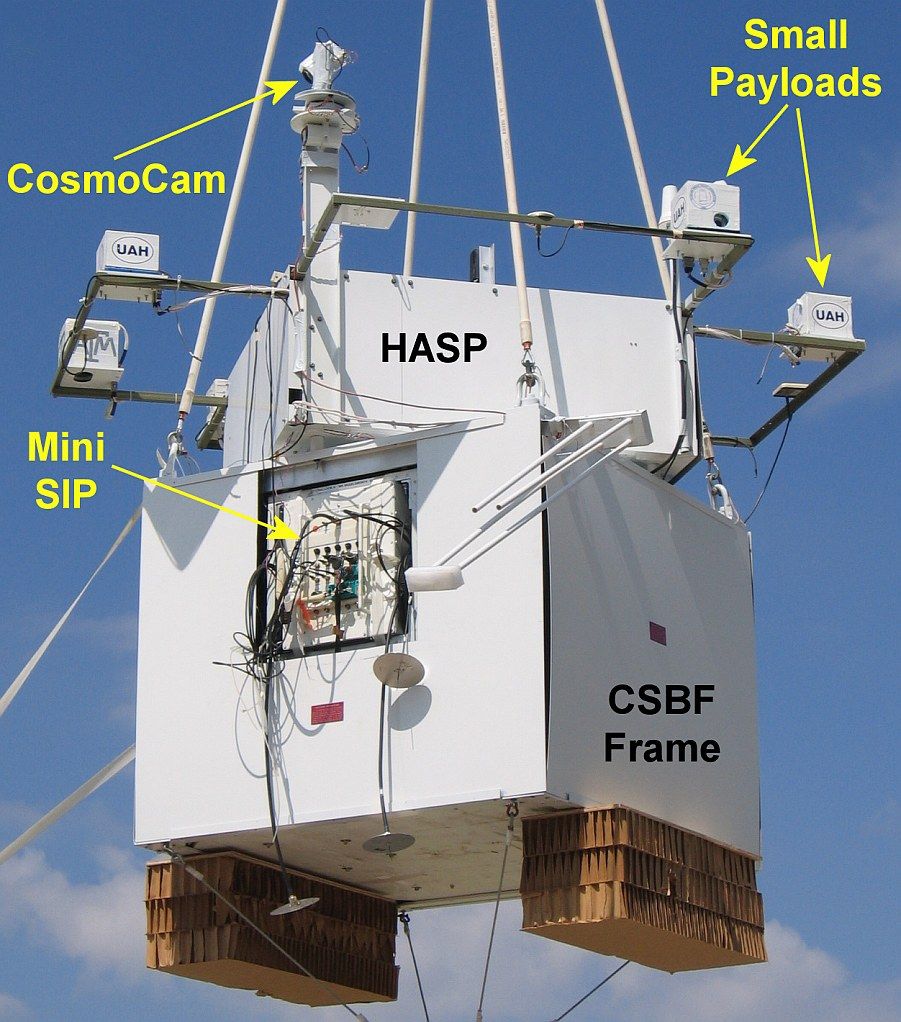
At left can be seen an image of the entire HASP flight configuration payload which is composed of two major components; the CSBF frame on the bottom and the HASP system on the top. The CSBF frame is the primary structural element of the payload and was recycled from an older test payload frame by the CSBF. This component houses all the subsystems CSBF requires to monitor and control the balloon vehicle. On the top corners of this frame are the attachment points for cabling leading to the swivel, flight train, parachute and balloon. Each suspension cable is threaded through a PVC pipe increasing the rigidity of the suspension system and reducing the probability that, upon landing, the swivel would impact student payloads located on the top of HASP. On the bottom of the CSBF frame is the cardboard honeycomb crush pad and attach points for the ballast hopper suspension cables.
The interior of the frame supports a Mini-SIP (Support Instrument Package) that interfaces to the HASP electronics and provides uplinkdownlink communication with the balloon payload, with empty room for a variety of prototypes and test articles, allowing the CSBF to test fly new technology that may improve the performance of future professional scientific balloon systems.
Attached to the core structural frame are four fiberglass frames that support the small (< 1 kg) student payloads. Each brace
extends 56 cm away from the aluminum frame and supports two student payload mounting plates, each of which includes standard mechanical, power and serial communication interfaces. One such brace is attached to each side of the core structure to accommodate up to eight student payloads. This configuration was chosen to minimize interference between the metal frame and any student payloads that may exercise their transmitters during flight. In addition, up to four large (< 10 kg) student payloads can be mounted on the top of the core structure and have a power and communication interface similar to that of the small payloads.
The command and control subsystem, provides the means for receiving and processing uplinked commands, acquiring and archiving the payload data, downlinking status information and interfacing with the student payloads. There are three primary control modules in the subsystem that communicate with each other over a 100 Mbps (megabit per second) internal Ethernet network. These modules are the Flight Control Unit (FCU) which "manages" the subsystem; decoding commands received from the CSBF supplied Mini-SIP and distributing them, watching for units that may need to be reset, collecting status information and downlinking data through the Mini-SIP. In addition, the FCU also monitors the voltages and currents of the power system and collects environmental temperature information for housekeeping records.
The Data Archive Unit (DAU) that controls the on-board recording of all data, making these data records available to other processes on the network, controlling the HASP GPS receiver and managing the time-stamping of all records. All on-board recording is to Compact Flash cards which appear as hard disks to the operating system, but function well in hard vacuum. The Serial Communications Unit (SCU) runs the software which communicates with the student payloads. Without this unit, student data will not be collected.
Finally, temperature sensors are placed at strategic locations around HASP (e.g. batteries, solar shield panels, exterior) to monitor the environment and assess the thermal performance of the system. The input power source for HASP is about 30 VDC and is provided by either a Lambda ZUP36-24 for ground operations or eight B7901-11 eleven cell lithium sulphur dioxide batteries for flight.
One of the major innovations incorporated into HASP was to mount all the command and control components on a single 109 cm x 36 cm Electronics Mounting Plate (EMP). This has the primary advantage that the EMP can be easily removed from the HASP frame for easy access to all the electronics during debugging, testing and/or servicing. In addition, a complete flight spare EMP was built during HASP development and can be used as a "plug and play" replacement in the field should problems arise with the original.
Details of the balloon flight
Balloon launched on: 9/4/2006 at 15:51
Launch site: Scientific Flight Balloon Facility, Fort Sumner, (NM), US
Balloon launched by: Columbia Scientific Balloon Facility (CSBF)
Balloon manufacturer/size/composition: Zero Pressure Balloon Raven - W11.82-1E-37 - 11.820.000 cuft
Balloon serial number: W11.82-1E-37
Flight identification number: 558N
End of flight (L for landing time, W for last contact, otherwise termination time): 9/5/2006 at 9:19
Balloon flight duration (F: time at float only, otherwise total flight time in d:days / h:hours or m:minutes - ): ~ 18 hs
Landing site: 42 miles N-NW of Flagstaff, Arizona, USA
Payload weight: 1002 lbs
Overall weight: 2000 lbs
The balloon was launched by dynamic method with assistance from launch vehicle on September 4th at 15:51 utc.
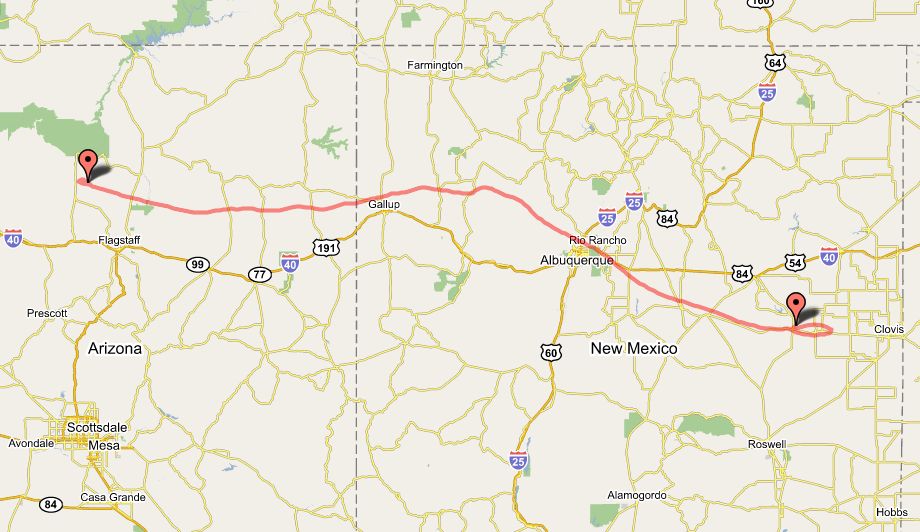
After a nominal ascent phase the balloon started a flight pathe due to the west and reached float altitude of 122.000 feet at 18:30 utc. At left can be seen a map showing the balloon path (click to enlarge).
After a flight of near 18 hours the separation ocurred at 9:22 UTC of the next day while flying over Arizona. The impact was at 10:02 UTC in coordinates 35º 47' N / 112º 0' W, 42 miles N-NW of Flagstaff, Arizona.
This first flight of the platform included the following experiments:
The Infrared Thermal Balloon Experiment (ITBE) of the University of Alabama - Huntsville (UAH) included three infrared telescopes located at different seats on the HASP braces looking up at the balloon to measure the thermal characteristics throughout the flight. UAH also included a separate camera payload to attempt to image the balloon as well as the horizon.
The GeoCam payload developed by students at Texas A&M University (TAMU) was a lookdown camera designed to study remote sensing techniques. During the flight GeoCam collected 1650 images.
The University of Louisiana - Lafayette developed a nuclear emulsion stack experiment designed to study high energy cosmic rays.
Finally, LSU students provided two experiments: the Accelerometer Inertial Navigation System (AINS) from LSU Physics & Astronomy uses three precision accelerometers to measure the motion of the payload, which consequently can be integrated to derive orientation and position. In addition, LSU Mechanical Engineering students developed the Aerospike experiment to study the performance of a conventional and an aerospike rocket nozzle as a function of altitude.
All HASP systems performed flawlessly during the flight. After initial flight configuration setup HASP required no further resets and no system reboots were required. The only commands sent during the flight were to power off the student payloads just before termination. HASP transmitted a continuous stream of diagnostic records, on-board data storage status messages, temperature, voltage and current information, student payload serial data, as well as GPS position, altitude and time data.
These data were downlinked to the HASP ground station for real-time monitoring and then transmitted over the internet to LSU where they were made available in near real-time on the HASP website.
External references
- HASP website Louisiana Space Consortium
- Balloon Launches Inside Wallops - Volume XX-06 Number 32
- Development of the High Altitude Student Platform 2006 COSPAR paper submitted to Advances in Space Research, Nov. 2006 (PDF Version)
- First Flight of HASP Presentation to the LSU Department of Physics and Astronomy Department Review, October 2006 (PPT format)
- Geocam (Blog)
- Geocam (web site)
- Infrared Thermal Balloon Experiment (web site)
- NASA Balloon Carries High Altitude Student Platform to the Edge of Space NASA press release
- NASA Balloon To Carry High Altitude Student Platform to the Edge Of Space Inside Wallops - Volume XX-06 Nº 31
- Overview of the NASA Balloon Program Office (BPO) and Potential Student Opportunities Presentation to the National Council of Space Grants Directors Meeting, October 2006
- Results from the low mass cosmic ray experiment on the HASP balloon Nuclear Science Symposium Conference Record, 2007. NSS '07. IEEE
- The High Altitude Student Platform (HASP) for Student-Built Payloads Presentation to the 35th COSPAR Scientific Assembly, July 2004
- Video of the flight obtained from CosmoCam at Youtube
Images of the mission




If you consider this website interesting or useful, you can help me to keep it up and running with a small donation to cover the operational costs. Just the equivalent of the price of a cup of coffee helps a lot.
