Purpose of the flight and payload description
This program was developed as a series of flight experiments for the research of the HOPE-X Reusable Launch Vehicle intended to be a future space shuttle.
The phase II, involved the droptest of a scale model of the vehicle from a stratospheric balloon.
The vehicle for this Phase of the project whose diagram can be seen at left (click to enlarge) was a model with a length of 3.8 mts, a height of 1.2 mts, a wing span of near 2.4 mts and a mass of 500 kgs, corresponding to a 25% completed scaled model of the future HOPE-X space plane. The devices on the surface such as antennas were designed not to affect aerodynamic characteristics of the vehicle.
It have generally the same components as those of the vehicle used in Phase I except the jet engine and the landing gears wich were replaced by a parachute system to recover the vehicle, and by airbags to absorb a shock at touch down, respectivelly. In addition, about 30 pressure sensors are installed on the surface of the fuselage and the base plane to acquire aerodynamic data during the flight at a transonic speed to clarify the transonic aerodynamic characteristics of a winged reentry vehicle configuration.
Also during the test it will obtain data to validate wind tunnel test and computational fluid dynamics (CFD) predictions and as a secondary objective to validate guidance & control system design technology for the transonic speed region.
Details of the balloon flight
Balloon launched on: 7/1/2003 at 06:03 local
Launch site: European Space Range, Kiruna, Sweden
Balloon launched by: Centre National d'Etudes Spatiales (CNES)
Balloon manufacturer/size/composition: Zero Pressure Balloon
End of flight (L for landing time, W for last contact, otherwise termination time): 7/1/2003
Landing site: In the so called "Zone B" devoted to the landing of the nosecones of the rockets launched from ESRANGE
Campaign: HSFD PHASE II
Payload weight: 500 kgs
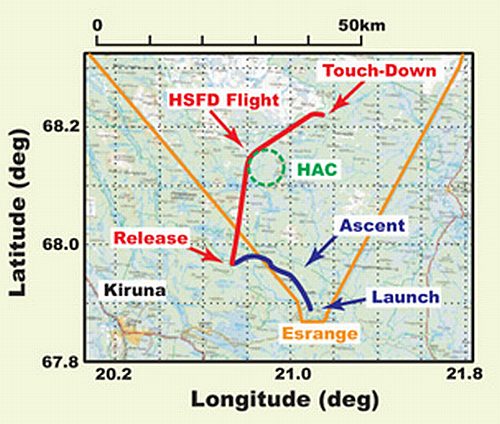
The launch of the balloon was performed on July 1st, 2003 at 06:03 local time. The operations involved a complex launch procedure, assisted by auxiliary balloons, which are later jettisoned, so that the vehicle is not exposed to any impacts and cannot be dragged along the ground.
After an initial ascent phase the balloon reached float altitude, but moved slightly outside of the so called "Zone B" assigned originally to perform safelly the drop test. Nevertheless, with the approval of the Esrange safety officer, the flight was allowed to continue as planned and the plane model was released from 21km at 07:14 local time.
When the demonstrator reached the landing site, the mission control commanded the recovery system to activate, but it did not work as expected and the demonstrator was damaged on touchdown. As a result, the flight experiment campaign was interrupted.
After a complex but nominal launch phase the HSFD was released from the balloon achieving 39 seconds after release, the target Mach 0.8. Constant Mach number data acquisition was initiated and continued for more than 40 seconds. Then the demonstrator decelerated to Mach 0.75 and the return phase was started.
The demonstrator selected the #5 landing site as the best site within it's range capability, and was guided to the selected site by flying along the surface of a Heading Alignment Cylinder (HAC).
As the demonstrator was released a little higher than the nominal release altitude, it was higher than the nominal trajectory during acceleration and trim insertion, but after the constant Mach phase, the flight trajectory was very close to the nominal.
When the demonstrator reached the landing site, the FCC commanded the recovery system to activate, but the recovery system did not work as expected and the demonstrator was damaged on touchdown.
As a result, the flight experiment campaign was interrupted.
Although the flight experiment was interrupted due to the demonstrator being damaged, valuable data were obtained. The demonstrator's aerodynamic characteristics at Mach 0.8 were estimated by analyzing the flight data, and these are now being utilized to improve the model. The secondary mission objective, verification of the guidance & control system for the transonic speed region, was also achieved for speeds up to Mach 0.8.
Time after this test was done the Japanese Space Agency made a cut in the funding of the project, leading to a virtuakl cancellation of it.
Nevertheless, the fully autonomous flight control design technology demonstrated, will form basic technologies for future space transportation systems.
External references
- High Speed Flight Demonstration - Phase II JAXA Japan Aerospace Exploration Agency
- Advanced drop tests from stratospheric balloons SpaceOps 2012 Conference Stockholm, Sweden
- HSFD Program JAXA website
- List of balloons launched from ESRANGE SSC Space website (via Archive.Org)
Images of the mission




If you consider this website interesting or useful, you can help me to keep it up and running with a small donation to cover the operational costs. Just the equivalent of the price of a cup of coffee helps a lot.
