Purpose of the flight and payload description
The Atmospheric Balloonborne Lidar Experiment or ABLE was a payload demonstrator of the development of the needed technology for space lidar platforms, to be deployed in the future on the Space Shuttle or on a dedicated satellite. The program was carried out by Visidyne Inc. from Burlinton, MA under contract with the Phillips Laboratory at Hanscom AFB. It was conceived in 1981, with successful flights in 1984, 1987, and 1988, followed by groundbased measurements made in 1989 and 1990.
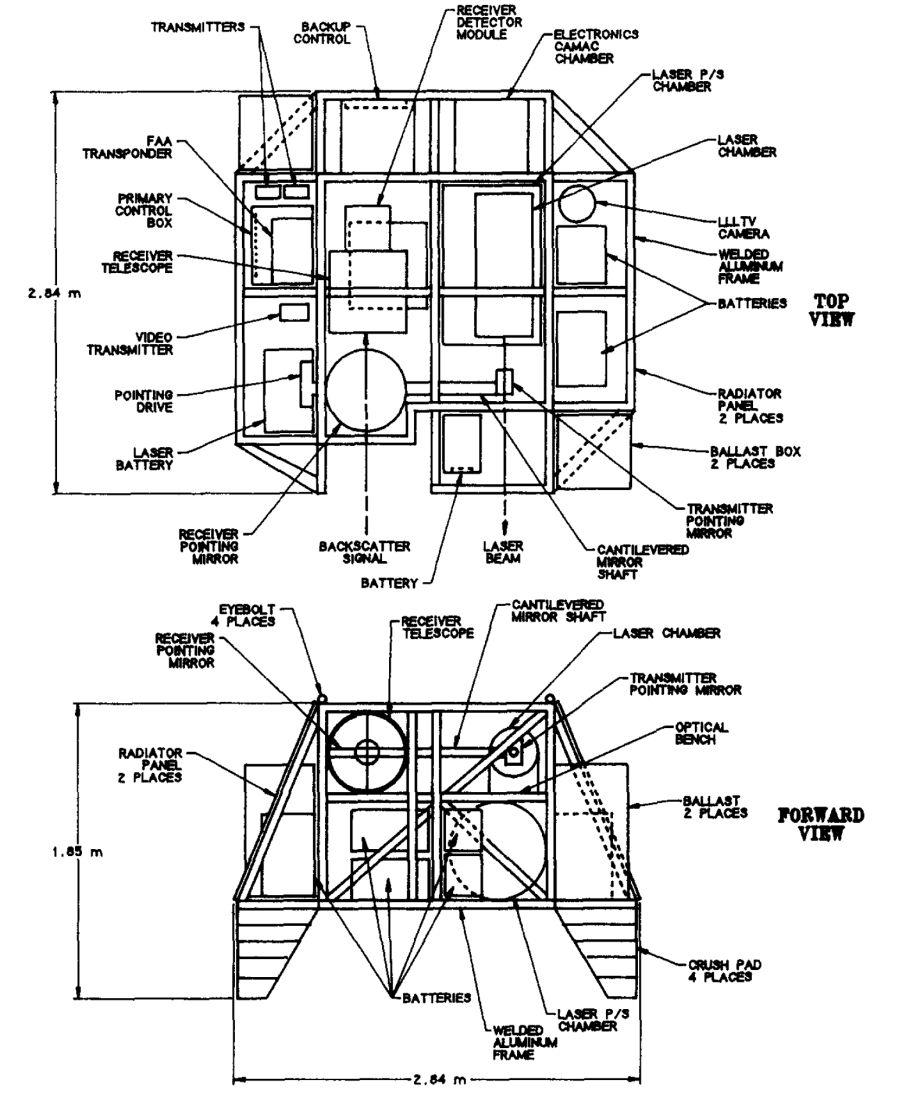
The ABLE lidar used a biaxial optical system with a multimode, frequency tripled, Nd:YAG laser transmitter and 50 cm Dall-Kirkham receiver optics. The flashlamp-pumped laser transmitter and power supplies were mounted in hermetically sealed pressure chambers which were maintained at an ambient pressure during flight.
The flashlamp thermal power was removed from the rod cavities by a primary cooling loop containing a mixture of deionized water and ethylene glycol, and transferred through a liquid-to-liquid heat exchanger to a secondary trichloroethylene cooling loop. This loop circulated the coolant through two outboard radiators where the laser system thermal load was dissipated by radiation and convection.
When the payload was configured for flight with batteries, balloon control electronics, telemetry electronics, ballast, and a recovery parachute, the launch weight was approximately 1270 kg.
The biaxial lidar system was mounted on an optical bench made of a rigid trussed structure of welded aluminum angle. Prior to payload fabrication, extensive structural and thermal analyses were performed to predict structural deflections.
An onboard microcomputer-controlled CAMAC system provided the lidar timing, current and pulse counting detector data digitization, analog housekeeping data acquisition, pointing mirror and filter wheel motor drive controls, uplink modem command interface, and downlink IRIG PCM data formatting. The unprocessed lidar PCM data were downlinked on an S-band telemetry link at 246 kbit/sec. The lidar data were recorded and graphically displayed in near real time at the ground station. A 300 baud command uplink provided real-time experiment control.
The lidar could be commanded to point 30 degrees from zenith, in the horizontal direction, and 2 dgrees from the nadir. The pointing of the lidar in the azimuth direction was not controlled but was monitored by a magnetic compass. Lidar beam steering was provided by a small multilayer dielectric laser pointing mirror and a 50 by 72 cm plane receiver pointing mirror. These mirrors were mounted on a common rigid shaft so that thermal variations did not affect their co-planar alignment.
Lidar safety was a major consideration in the operational planning for each flight. Laser operation in flight required the simultaneous transmission of commands from the ground station to the payload over two independent RF links. During flight, nadir lidar operation was not permitted unless the payload was above a specific altitude inside airspace of the White Sands Missile Range.
Prior to each launch the flight configured payload was subjected to a simulated flight test, in an environmental chamber, at the thermal and pressure conditions to be encountered during ascent and float.
Details of the balloon flight
Balloon launched on: 9/15/1988 at
Launch site: White Sands Missile Range, New Mexico, US
Balloon launched by: Air Force Geophysics Laboratory (AFGL)
Balloon manufacturer/size/composition: Zero Pressure Balloon 150.000 m3
End of flight (L for landing time, W for last contact, otherwise termination time): 9/16/1988
Landing site: Over White Sands Missile Range, New Mexico, US, USA
Payload weight: 1270 kgs
Balloon Flight
The balloon was launched by dynamic method from Northrop Strip, in the White Sands Missile Range, New Mexico on September 15th, 1988. The balloon drifted acording to the flight plan, 24 km east during ascentand after reaching 18 km it reversed to the west. After drifting approximately 48 km back over the range at a 21 km float altitude, the flight was terminated.
During parachute descent the mid-altitude easterly winds drove the payload back to an impact point approximately five miles west of the original launch site.
Scientific results
This was the third and last balloon-borne mission of the instrument. For this flight the lidar receiver used in the previous two missions was redesigned so that in addition to obtaining Rayleigh and Mie scattering, Raman backscatter measurements could be made. Also the lidar pointing system was modified to permit backscatter measurement at a series of angles from nadir. By making Rayleigh and Raman measurements at each angle, the aerosol backscatter coefficient could be determined.
After launch, the lidar, pointing at 30 degrees from zenith, was turned on immediately so as to obtain low altitude Raman data. Good quality data was obtained throughout ascent and into float.
External references
- Balloonborne lidar payloads for remote sensing Advances in Space Research 14(2):95-100 · February 1994
- Brief mention to the ABLE project at Visidyne website
- Engineering and Instrumentation Support of GL Research Balloon Program Final rept. 1 Dec 87-10 Dec 89
Images of the mission
If you consider this website interesting or useful, you can help me to keep it up and running with a small donation to cover the operational costs. Just the equivalent of the price of a cup of coffee helps a lot.
