Purpose of the flight and payload description
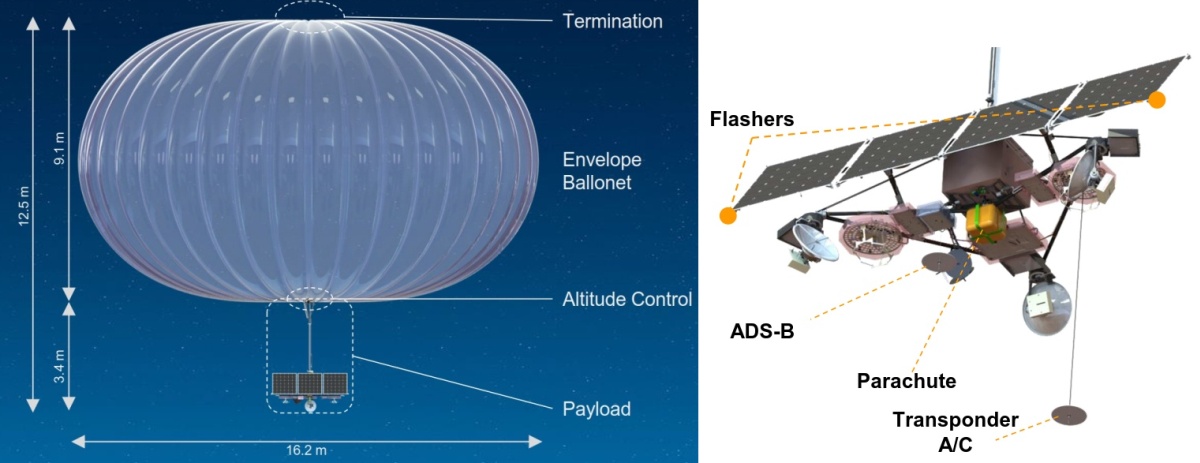
Project Loon was an initiative to establish a network of high altitude unmanned balloons to provide Internet connectivity in underserved parts of the world or during disaster recovery efforts. The project started in 2011 and became public in 2013 as part of Google's research and development of new technologies carried out through X Development LLC. The Loon Project used superpressure balloon fleets capable of long-duration flights to create a network that would provide connectivity to people in a defined area in the same way that a group of cell phone towers on the ground form a terrestrial network. The entire network operated autonomously, routing connectivity through balloons and ground stations, taking into account the movement of the balloon, obstructions and weather events. Above left we can see a basic schematic of the fully inflated balloon and payload (click for more details)
The elements that made up the Loon system are described below
Superpressure balloon
They were manufactured by Raven Aerostar using polyethylene or nylon with dimensions at launch of 60 feet high by 15 feet wide (18 meters by 5 meters). The floating altitude of the balloons was in the range of 18 to 23 km (60,000 to 75,000 feet) well above commercial aircraft and weather events. Helium was used to inflate the main balloon and once it reached the floating height it expanded and pressurized, acquiring the typical pumpkin shape and its final dimensions: 30 feet high by 50 feet wide (9 m by 15 m). Inside the main balloon there was a smaller one called a "ballonet" which served as ballast and was the heart of Loon's targeting system: air was introduced into it by means of a specially built pump that allowed to modify the weight of the balloon to ascend or descend. Although it was not possible to directly control its course or speed, these changes in altitude allowed the balloon to take advantage of different wind patterns at different altitudes for navigation. The balloons also had a valve in the upper part that was used to ventilate the helium at the end of the flight, as well as envelope cutters, to prevent it from rising again if caught by the wind once landed.
Payload
The flight system -which varied from one mission to another and evolved a lot over time- basically contained the flight computer, environmental sensors, a transponder (A/C mode and ADS-B Out capability on certain flights), a GPS receiver, an Iridium satellite tranceptor and a parachute. The balloons carried two types of communication equipment for operations with local telecommunications companies: a broad-coverage LTE base station (or "eNodeB"), which transmited internet connectivity directly to a user's LTE-enabled phone, and a high-speed directional link used to connect between balloons and back down to the internet infrastructure on the ground. Additionaly, the balloons carried instruments to monitor the weather and ambient environmental conditions. There were no cameras or other surveillance instruments aboard the operational balloons. These items were often part of the payload only on short-duration R&D flights that never left the US territory.
All these elements were mounted on a tubular aluminum and styrofoam structure. Attached solar panels powered the entire system during the day, while charging lithium batteries that powered the systems at night. The entire structure was attached to the balloon by means of a rigid aluminum pipe that ensured that both elements remained together during the descent. The total mass varied between 30 and 50 kg. Although the balloons flew well above commercial aviation, they had several safety measures to rule out any possibility of collision: the entire structure was covered by radar reflective material, in each corner of the solar panels there was an omnidirectional white strobe light with a range of 5 nautical miles that flashed once per second, and a transponder constantly transmitting the position and altitude of the balloon to air traffic control and other nearby aircraft.
Flight profile
The flight of each balloon was closely monitored from Loon Mission Control (LMC) in Mountain View, California, by trained flight engineers on duty 24/7. Through multiple sensors, the LMC monitored the status of each balloon, made decisions about its route, and communicated with air controllers when necessary. The positioning of the balloon fleet was controlled in real time using high-frequency telemetry and satellite links. By using predictive models of the winds and autonomous decision-making algorithms to move each balloon up or down to obtain the correct direction of flight, allowed to direct the balloon towards the set destination. The navigation system operated autonomously using proprietary software and algorithms, with continuous supervision by human operators. When a balloon was ready to be taken out of service, LMC engineers tracked its location using GPS and coordinated directly with local air traffic control to bring it down safely in sparsely populated areas. The gas was then flushed out of the balloon causing the balloon to descend to a pre-established altitude at which the parachute was automatically deployed. After landing, the recovery teams on the ground recovered the remains for reuse and recycling. Average flight time could range from a few hours to more than 300 days.
The project was terminated in 2021 due to its financial unsustainability.
Details of the balloon flight
Balloon launched on: 3/1/2019 at ~ 21:00 utc
Launch site: Jose Aponte de la Torre Airport, Ceiba, Puerto Rico
Balloon launched by: Loon LLC
Balloon manufacturer/size/composition: Superpressure balloon with internal ballonet
Flight identification number: P-556
End of flight (L for landing time, W for last contact, otherwise termination time): 3/18/2019
Balloon flight duration (F: time at float only, otherwise total flight time in d:days / h:hours or m:minutes - ): 17 d
Landing site: 40 km W of Ica, Peru
External references
- Project Loon Website
- Flight path of the first day in flight of the balloon ADS-B exchange website
- Flight path of the last day in flight of the balloon ADS-B exchange website
If you consider this website interesting or useful, you can help me to keep it up and running with a small donation to cover the operational costs. Just the equivalent of the price of a cup of coffee helps a lot.
