Purpose of the flight and payload description
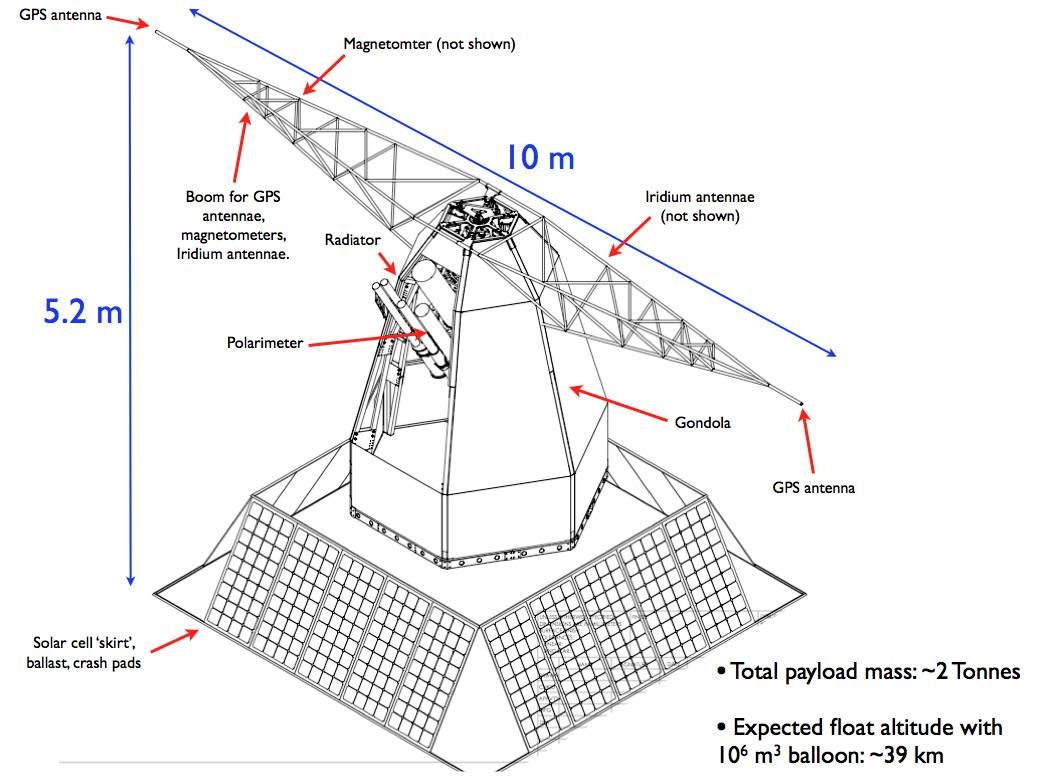
PoGOLite is an instrument designed to measure the polarisation of photons in the energy range of 25~80 KEV. It's main objective is to probe the geometry of and processes inherent in objects such as pulsars, pulsar wind nebulae, accretion disks, jets, and highly magnetized neutron stars. At left can be seen an scheme of the instrument mounted in the gondola (click to enlarge).
The heart of the instrument employs a hexagonal array of detectors, consisting of phoswich detector cells surrounded by a segmented side anticoincidence system (SAS). Each phoswich detector cell (PDC) consists of a hollow slow scintillator along with a Bismuth germanate (BGO) crystal for rejection of off-axis events, and a fast scintillator for detection of polarization events. The slow scintillator is situated at the entrance of the instrument and acts as a collimator in order to detect particles and photons which do not arrive from the direction of the source. Each slow scintillator is hollow to allow photons from the direction of the source through to the fast scintillator, which is directly beneath. The BGO crystal just below the fast scintillator signals when a photon or particle enters the detector from beneath. The fast scintillator is used as part of the array of fast scintillators for determining the polarization of incoming photons. Each side anticoincidence system unit comprises three BGO crystals glued together, for rejection of background events from the sides, forming a shield around the array of PDCs and allowing the vetoing of events which include a hit to one of these side detectors. A photomultiplier tube is attached to each PDC and SAS unit for single photoelectron detection.
The present configuration for the POGOlite pathfinder mission includes 61 PDCs and 30 SAS units. In a future flight the full instrument will count with 217 PDCs and 54 SAS units.
In the stratosphere, albedo neutrons are produced by cosmic rays scattering off the atmosphere, and these are expected to dominate the background, thus, is important that only events from the scattering of an incoming source photon are counted. Both passive and active background rejection systems are employed. A neutron arriving from the side of the polarimeter will produce a scattering event very much like that produced by a source photon, so thick layers of polyethylene are placed beneath the PMTs and around the outside of the instrument, to absorb the neutrons. The SAS is placed around the PDC array in order to determine if a particle entered the instrument from the side, and the BGO crystals below the fast scintillators enable further background rejection. The field of view is narrow because the slow scintillators are used to collimate the photons arriving at the fast scintillators and the pointing system ensures that the instrument is kept pointing at the target through a data acquisition run.
The data acquisition electronics consist of twelve flash Analog to Digital Converters (FADC) boards, a digital In/Out board, a SpaceCube computer, and two router boards which connect the other components through ESA'S SpaceWire standard. During an observational run, the data (polarization waveforms) are stored on any FADC available board. Once enough information is obtained, the SpaceCube store it on a CompactFlash card. They are then transmitted after every data run to an onboard solid state disk drive, in order to be accessible from the ground station.
As POGOlite is specially suited to observe point-like sources, is of paramount importance to count with a reliable pointing/stabilization system. For this the scientific team developed the attitude control system (ACS). It consists of a differential GPS system, two gyroscopes (fibre-optic and micromechanical), accelerometers, magnetometers, and a fast star tracker connected to a small real-time computer. All this is supplemented by a slower star tracker which calculates the exact viewing angle by fitting the locations of stars in the field of view to the coordinates of objects in a database. The instrument is connected to the balloon flight train through a momentum dump system which along with a flywheel allows to compensate the slow perturbations injected in the system by the balloon dynamics. An elevation motor can adjust the pointing angle toward most areas of the sky. To reduce systematic effects, the entire polarimeter is rotated around its viewing axis during data acquisition by means of a bearing system and a motor. For each polarization event, the rotation angle of the instrument is recorded.
The detectors, photomultipliers, and electronics are contained within a system of connected pressure vessels in order to keep them at 1 atmosphere of pressure and to maintain a good working temperature. The slow star tracker and other devices are contained within separate pressure vessels. The instrument is controlled by means of an onboard realtime computer which communicates with the attitude control system and the slow star tracker to control and monitor the pointing, the cooling system, and the pressure vessels. The computer also initiates data acquisition runs and command the storage of housekeeping and other data in the onboard solid state drive.
The polarimeter along with the attitude control system are mounted in a two part gondola measuring 5 meters tall which was specially designed by engineers of the swedish space corporation (SSC). The upper part is connected to the ACS frame and also provides a mounting point for the cooling system radiators and pump. The lower section houses batteries, power control electronics and communications equipment. The gondola frame is covered with lightweight honeycomb panels which enhance the structural rigidity and help protect the polarimeter from damage during landing. From this mission on, the gondola con?guration was changed in order to simplify on-ground handling and to reduce the gondola mass. In particular, the solar cell con?guration was changed and the power control system optimised, allowing for a reduction in the number of batteries.
Video footage of the launch
Details of the balloon flight

Balloon launched on: 7/12/2013 at 8:18 utc
Launch site: European Space Range, Kiruna, Sweden
Balloon launched by: Swedish Space Corporation (SSC)
Balloon manufacturer/size/composition: Zero Pressure Balloon Raven 39.570.000 cuft
End of flight (L for landing time, W for last contact, otherwise termination time): 7/25/2013 at 23:20 utc
Balloon flight duration (F: time at float only, otherwise total flight time in d:days / h:hours or m:minutes - ): 13 d 15 h
Landing site: 100 km NW of Norilsk, Russia
Payload weight: 2621 kg
The balloon was launched using the dynamic method with assistance of the HERCULES launch vehicle, on July 12 at 8:18 utc. After a nominal ascent phase, the balloon developed a typical summer flight path to the west in a more or less straight line along the parallels of 67º and 68º, crossing the Atlantic, Greenland and entering in Canada following a route similar to the one followed by the balloons that are launched by NASA from Sweden to Canada in transatlantic flights. The following days the balloon drifted over north-west Canada and Alaska, and by July 19 it approached the Bering Strait almost at the same time that the Russian authorities granted permission to overfly its territory. The balloon entered Russian airspace over Chukchi Sea with perspectives for an end of the flight in Scandinavia as planned, but as the flight progressed to the west over Siberia, the ESRANGE staff that operated the balloon (releasing gas to allow the descent or jettisoning ballast to the opposite) found very hard to maintain it in a stable route: it started to drift sligthly to the north.
On July 25, the perspective for recovery changed as this flight path would take the balloon and its precious cargo, away from Scandinavia, with the next ground on sight to perform the landing being Greenland. Taking account the risk of also missing Greenland and with a very succesfull flight achieved, decision was taken to bring it down before it could approach more to the sea shore. The gondola was cut from the balloon in the early hours of July 26 and touched down near a lake, close to Norilsk, an industrial city located between the Yenisei River and the Taymyr Peninsula in Krasnoyarsk Krai, Russia.
Although POGOLITE was unable to complete a full circle around the pole, from the standpoint of scientific ballooning, the mission is a complete success and an historical achievement as for the first time in almost 15 years, a balloon this size is allowed to overflight Russian territory. The last mission of the kind was launched by Nasa from Alaska in June 1998.
External references
- POGOlite home page at The Royal Institute of Technology
- Balloon-borne gamma-ray polarimetry 20th ESA Symposium on European Rocket and Balloon Programmes
- Balloon-borne hard X-ray astronomy with PoGOLite: Opening a new window on the universe proceedings of "X-ray Astronomy: towards the next 50 years!", Milan, October 1-5, 2012
- Images of the recovery effort in Russia Siberian Aviation search and rescue center website
- List of balloons launched from ESRANGE SSC Space website (via Archive.Org)
- News about the recuperation of the Pogolite gondola published by the Polar Herald a newspaper from Norilsk, Russia
- Observation of polarised hard X-ray emission from the Crab by the PoGOLite Pathfinder Accepted for publication in MNRAS Letters
- Pathfinder flight of the Polarized Gamma-ray Observer (PoGOLite) in 2013 5th Fermi Symposium : Nagoya, Japan : 20-24 Oct, 2014
- Preflight performance studies of the PoGOLite hard X-ray polarimeter Accepted for publication on Astroparticle Physics
- The design and flight performance of the PoGOLite Pathfinder balloon-borne hard X-ray polarimeter Accepted for publication in Experimental Astronomy.
- The PoGOLite control system and software Instrumentation and Methods for Astrophysics (astro-ph.IM)
Images of the mission





If you consider this website interesting or useful, you can help me to keep it up and running with a small donation to cover the operational costs. Just the equivalent of the price of a cup of coffee helps a lot.
