Purpose of the flight and payload description
Is a stratospheric telescope conceived to map the magnetic field structure of many different star-forming regions, for addressing what role these fields play in the star formation process.
With the addition of a polarimeter, the original BLAST telescope is now capable of probing linearly polarized Galactic dust emission, hence her new name BLAST-Pol. Originally designed to conduct wide-area extragalactic and Galactic surveys at submillimeter wavelengths BLAST had two long duration balloon flights one from Sweden to Canada in 2005 and another in Antarctica in 2006. On this last flight, after termination the parachute could not be detached, which resulted in the payload being dragged 200 km over the ground in 24 hours. BLAST hardware was totally destroyed, with the exception of the mirrors, detectors, receiver and the pressure vessel with the experiment data which were recovered.
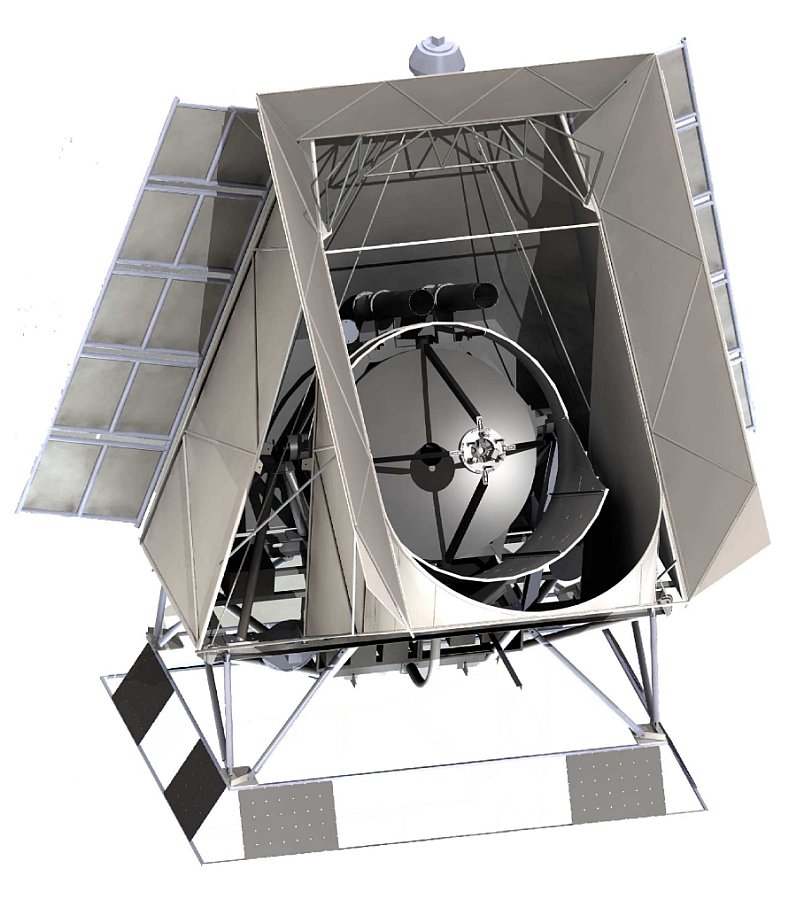
The telescope is of a Cassegrain type with a 1.8m parabolic primary mirror (M1) and a 40 cm correcting secondary (M2) which redirects the light to a series of cryogenically cooled re-imaging optics (M3, M4, M5). Although the primary mirror was recovered after the destruction of BLAST, eventually it was decided that a new primary mirror was needed. The secondary mirror was also recovered after BLAST last flight, and has been reused for BLAST-Pol after resurfacing to remove some scratches.
Three stepper motor actuators change the position of the secondary mirror with respect to the primary mainly to compensate changes to the radii of curvature of the optical surfaces due to diurnal temperature variations during flight. These actuators are also used to set the original tip/tilt alignment of the secondary.
The cryostat houses most of the receiver system. It is constructed of aluminum and G10 woven fiberglass reinforced resin epoxy and is maintained at vacuum to prevent thermal convection. Each thermal stage is light-tight except the optical path, which is thermally protected with infrared blocking filters. Liquid baths of nitrogen and helium maintain the temperatures of the 77K and 4.2 K stages. In flight, an absolute pressure regulator is used to maintain approximately 1 atm
above each bath. A vapor cooled shield is located between the nitrogen and helium stages which is cooled by boil-off gas from the helium bath and reduces the thermal loading on the helium stage. The cryostat holds 43 liters of nitrogen and 32 liters of helium and has an 11.5 day hold time.
The BLAST focal plane consists of arrays of 149, 88, and 43 detectors at 250, 350, and 500µm, respectively. The arrays are cooled to a temperature of 270mK. Each array element is a silicon nitride micromesh "spider web" bolometer. The detector arrays, the feeds, and the mounting scheme are based on the SPIRE instrument design.
For BLAST-Pol an Achromatic Half Wave Plate has been incorporated into the optical design and mounted inside the optics box near the Cassegrain focus of the telescope. The use of this kind of rotating piece acting as a polarization modulator is a widespread technique in observations at millimeter and submillimeter wavelengths. However, it is operated in a stepped mode, rather than a continuously rotating mode. The rotator employs a pair of thin-section steel ball bearings housed in a stainless steel structure, and is driven via a gear train and a shaft leading to a stepper motor outside the cryostat.
The detectors are read out with an AC-biased differential circuit and then the data acquisition electronics demodulate the signals to provide noise stability to low frequencies, allowing to observe the sky in a slowly-scanned mode which is the best method to observe large regions of sky. The data is collected using a high-speed, flexible, data acquisition system which can synchronously sample up to 600 channels. Each channel consists of a buffered input and an analog to digital converter. The output from 24 channels are then processed by a logic device which demodulates each input and are stored to disk.
All these elements are mounted in a specially built gondola composed by three main components: an outer frame, suspended from the balloon flight train by cables and a pivot motor; an inner frame which is attached to the outer frame at two points along a horizontal axis; and a set of Sun shields that attach to the outerframe. The frame is constructed of light-weight aluminum tubing and I-beam.
The outer frame is pointed in azimuth using two elements: a reaction wheel with a diameter of 1.5 m made of 7.6 cm thick aluminum honeycomb and a vertical axis pivot at the attachment of the gondola to the flight train, which also minimizes the external torque from wind shear acting on the gondola and balloon rotation. It also provides mounts for various electronics boxes, including the flight computers, the CSBF electronics, various pointing sensors, and flight batteries.
The inner frame is made from thin-wall aluminum box beam. It supports the telescope, cryostat,detector read-out electronics, gyroscopes and star cameras. It is attached to the outer frame at two points, defining an axis of rotation controlled by a motor mounted on one side of the inner frame at the attachment point to the outer frame. A free bearing provides the connection point on the other side.
The back, sides and bottom of the gondola are surrounded by Sun shields, allowing the telescope to point as low as 25 degrees in elevation in order to observe targets close to the Galactic Center.
BLAST is designed to operate autonomously without need of ground commanding. Telescope control is provided by a pair of redundant flight computers with Intel Celeron processors, running Linux as operative system. The computers are kept at near atmospheric pressure to allow the hard drives to function properly and to provide the appropriate thermal environment for the CPUs. The communication link between the telescope and the ground is provided by CSBF through a number of line-of-sight (LOS) transmitters and satellite links.
The primary pointing sensors for BLAST are a pair of CCD-based star cameras and Fiber-Optic rate gyroscopes. The star cameras provide absolute pointing and the gyros provide velocity information which can be integrated to allow interpolation of the gondola's attitude between star camera solutions. Coarse attitude determination is provided by several additional sensors: in elevation, there is an encoder on the elevation axis and a tilt sensor on the inner frame; in azimuth, there is a Sun sensor, a differential GPS unit, and a flux gate magnetometer.
Solar panels mounted at the back of the telescope on the support structure for the Sun shields, provide power to the flight electronics by charging NiMH batteries. The panels face the Sun from only one side and are radiatively cooled to the sky from the other side.
Video footage of the launch
Details of the balloon flight
Balloon launched on: 12/27/2010 at 4:06 utc
Launch site: Williams Field, McMurdo Station, Antarctica
Balloon launched by: Columbia Scientific Balloon Facility (CSBF)
Balloon manufacturer/size/composition: Zero Pressure Balloon Aerostar - SF 39.57 (39.500.000 cuft)
Flight identification number: 615N
End of flight (L for landing time, W for last contact, otherwise termination time): 1/5/2011 at 21:31 utc
Balloon flight duration (F: time at float only, otherwise total flight time in d:days / h:hours or m:minutes - ): 9 d 17 h 9 m
Landing site: 330 Nautic Miles SSE of McMurdo Station, Antarctica
The balloon was launched by dynamic method with assistance of a launch vehicle (The Boss) on December 27 at 4:06 UTC time. It was a good launch in good weather conditions. The payload ascended normally and achieved float altitude around 129.500 ft starting the nominal anticlockwise turn around the pole.
Near completing the first circle to the continent the scientific team decided to terminate the mission after one circumnavigation, due in part to the favorable balloon trajectory (which allowed a payload impact close to McMurdo Station) and the fact that an easier or complete recovery of the instrument was deemed of higher priority to a longer flight.
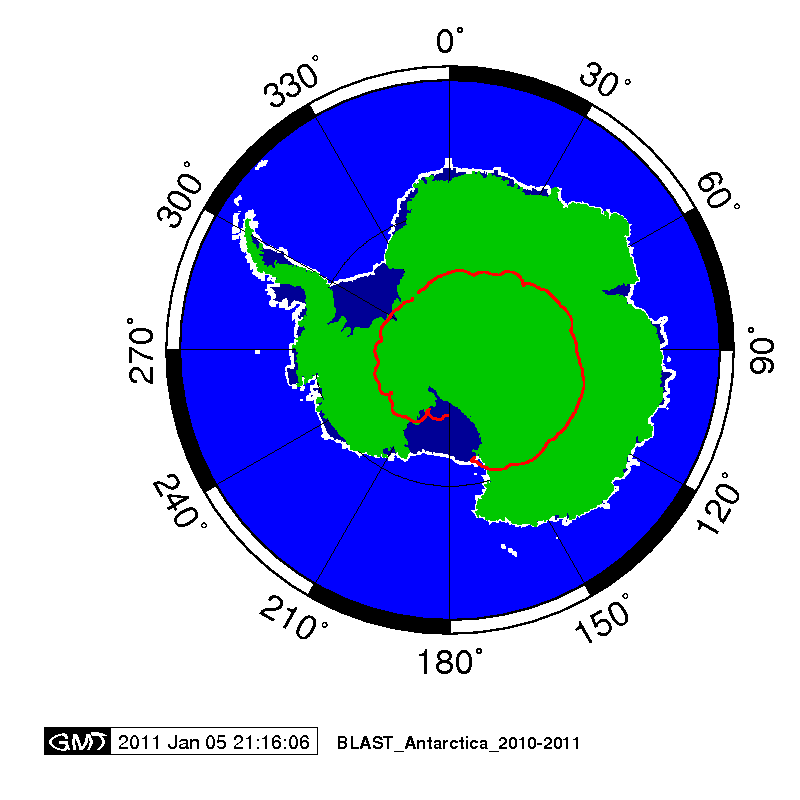
Thus the end of mission was commanded via satellite from the Operations Control Center of the Columbia Scientific Balloon Facility (CSBF), located in Palestine, Texas at 21:31 utc time while the balloon was flying over the Ross Ice Shelf on January 5, after 9 days and 17 hours of flight.
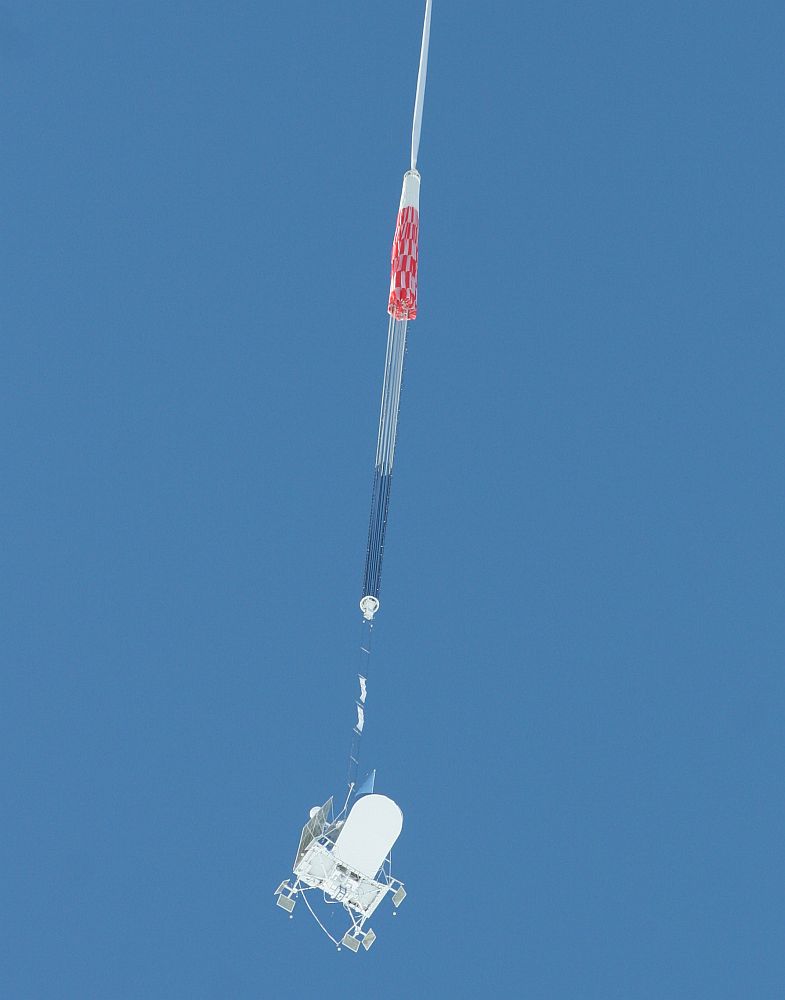
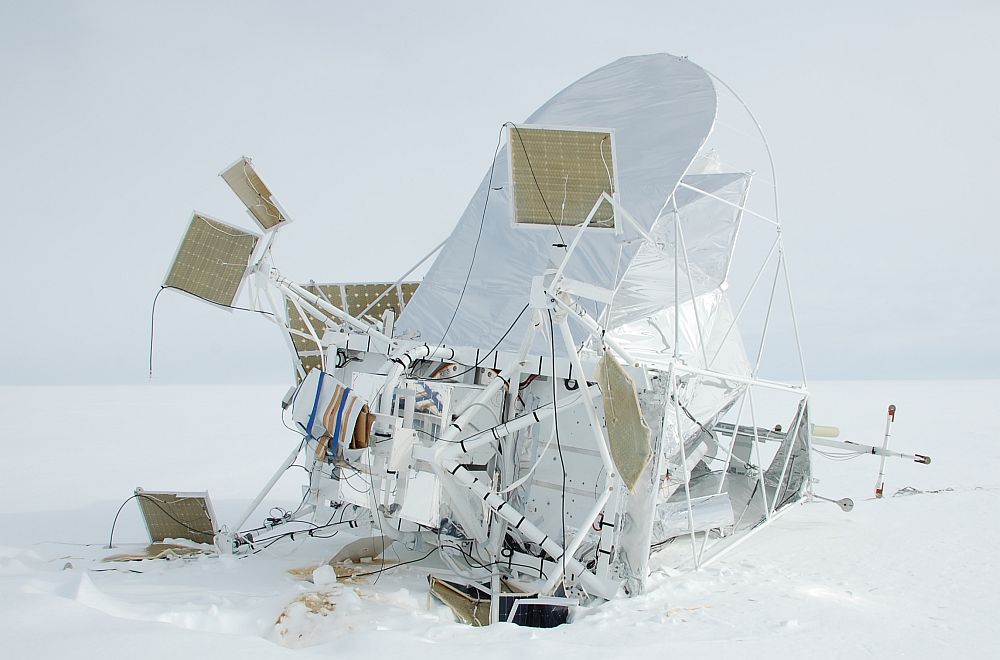
After the long descent under parachute, the payload landed 300 miles SSE of the launch base. In the map at right is plotted the entire flight path of the mission. Althought the impact site was located in terms of Antarctic distances "close" to the base the weather was not much cooperative during great part of January, forcing to cancel the recovery effort over and over. It was finally completed in the first days of Febraury. By the way, the instrument suffered only cosmetic damage.
According to the scientific team, after the launch and during the first hours of flight they experienced some problems to achieve stable pointing of the celestial sources to be studied, but by the time they switched from the line of sight system to the satellital link they were able to start the scanning.
Additionally, critical payload systems such as the star camera, cryogenic system and a new GPS locating system workED extremely well and their detector sensitivity was higher than expected.
External references
- BLAST website University of Pennsylvania
- Attitude determination for balloon-borne experiments SPIE Ground-based and Airborne Telescopes V, June 23, 2014
- BLASTbus electronics: general-purpose readout and control for balloon-borne experiments SPIE Ground-based and Airborne Telescopes V, June 23, 2014
- BLAST-Pol campaign images I a webgallery at Flickr of Juan Soler
- BLAST-Pol campaign images II a webgallery at Flickr of Matthew Truch
- BLAST-Pol campaign images III a webgallery at Flickr of Tristan Matthews
- Dropping Ballast a detailed weblog of the launch campaign
- In Search of an Imprint of Magnetization in the Balloon-borne Observations of the Polarized Dust Emission from Molecular Clouds Ph.D Thesis by Juan Diego Soler, University of Toronto (2013)
- Lupus I Observations from the 2010 Flight of the Balloon-borne Large Aperture Submillimeter Telescope for Polarimetry Submitted to ApJ
- Polarimetry from the Stratosphere with Spider and BLASTPol Ph.D Thesis by Jamil Aly Shariffl, University of Toronto (2015)
- Probing the Role Played by Magnetic Fields in Star Formation with BLASTPol Ph.D Thesis by Laura Marion Fissel, University of Toronto (2013)
- The balloon-borne large-aperture submillimeter telescope for polarimetry: BLAST-Pol Submitted to SPIE Astronomical Telescopes and Instrumentation Conference 2010
- Thermal design and performance of the balloon-borne large aperture submillimeter telescope for polarimetry BLASTPol SPIE Ground-based and Airborne Telescopes V, June 23, 2014
Images of the mission

If you consider this website interesting or useful, you can help me to keep it up and running with a small donation to cover the operational costs. Just the equivalent of the price of a cup of coffee helps a lot.
